4.7 Sobel算子、Laplacian算子、Canny边缘检测
写在前面:
1.Sobel算子
在Opencv Python使用 Sobel算子:
dst = cv2.Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
函数返回其处理结果。前四个是必须的参数:
- 第一个参数是需要处理的图像;
- 第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
- dx和dy表示的是求导的阶数,0表示这个方向上没有求导,一般为0、1、2。
其后是可选的参数:
- dst不用解释了;
- ksize是Sobel算子的大小,必须为1、3、5、7。
- scale是缩放导数的比例常数,默认情况下没有伸缩系数;
- delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
- borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
代码:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("G:/python project/cat.jpg", 0)
x = cv2.Sobel(img,cv2.CV_16S,1,0)
y = cv2.Sobel(img,cv2.CV_16S,0,1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX,0.5,absY,0.5,0)
cv2.imshow("origin",img)
cv2.imshow("absX", absX)
cv2.imshow("absY", absY)
cv2.imshow("Result", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
注意:
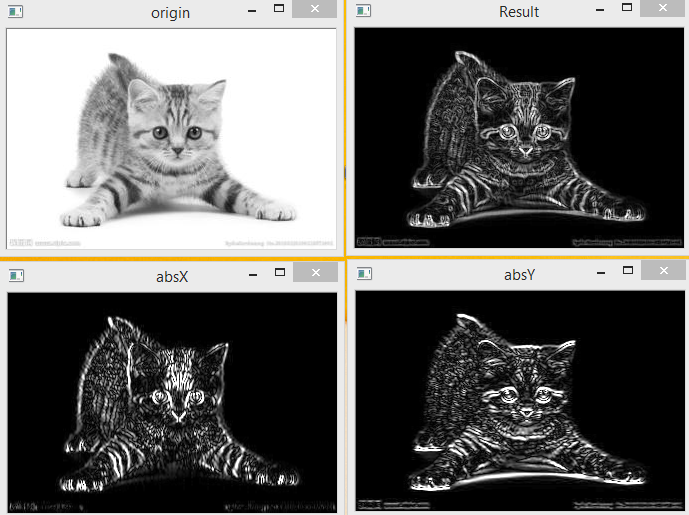
- 在Sobel函数的第二个参数这里使用了cv2.CV_16S。因为OpenCV文档中对Sobel算子的介绍中有这么一句:“in the case of 8-bit input images it will result in truncated derivatives”。即Sobel函数求完导数后会有负值,还有会大于255的值。而原图像是uint8,即8位无符号数,所以Sobel建立的图像位数不够,会有截断。因此要使用16位有符号的数据类型,即cv2.CV_16S。
- 在经过处理后,别忘了用convertScaleAbs()函数将其转回原来的uint8形式。否则将无法显示图像,而只是一副灰色的窗口。
- 由于Sobel算子是在两个方向计算的,最后还需要用cv2.addWeighted(...)函数将其组合起来。
Sobel处理的结果:
2.Laplacian算子
在Opencv使用Laplacian算子:
dst = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
前两个是必须的参数:
第一个参数是需要处理的图像;
第二个参数是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
其后是可选的参数:
- dst不用解释了;
- ksize是算子的大小,必须为1、3、5、7。默认为1。
- scale是缩放导数的比例常数,默认情况下没有伸缩系数;
- delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
- borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
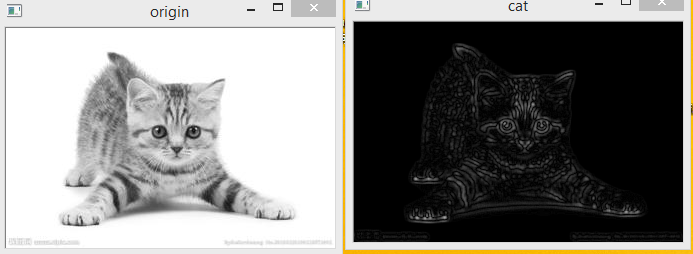
【注】:为了达到更好的效果,用高斯模糊先处理一下,再使用拉普拉斯函数处理。(主要是对原图像进行去噪,这样效果会更好)
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("G:/python project/cat.jpg",0)
gaussianResult = cv2.GaussianBlur(img,(5,5),1.5) # Gaussian filter
gray_lap = cv2.Laplacian(gaussianResult,cv2.CV_16S,ksize = 3) #Laplacian
dst = cv2.convertScaleAbs(gray_lap) #transfer uint8
cv2.imshow('cat',dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
3.Canny边缘检测
在Opencv Python上使用canny边缘检测:
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
必要参数:
- 第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
- 第二个参数是阈值1;
第三个参数是阈值2。
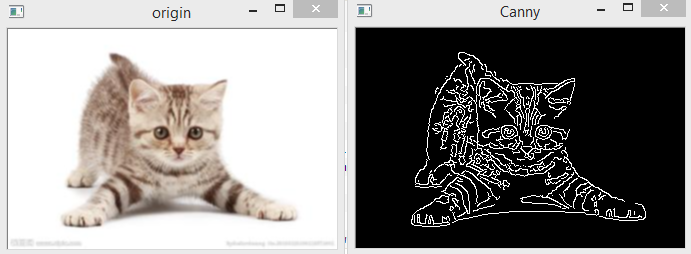
其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
函数返回一副二值图,其中包含检测出的边缘。
使用canny边缘提取,①由于canny处理是灰度图,所以需要将图先处理为灰度图;②使用之前用高斯平滑处理去噪效果更佳;
import cv2
import numpy as np
img = cv2.imread("G:/python project/cat.jpg")
img = cv2.GaussianBlur(img,(3,3),0)
canny = cv2.Canny(img, 50, 150)
cv2.imshow('origin',img)
cv2.imshow('Canny', canny)
cv2.waitKey(0)
cv2.destroyAllWindows()
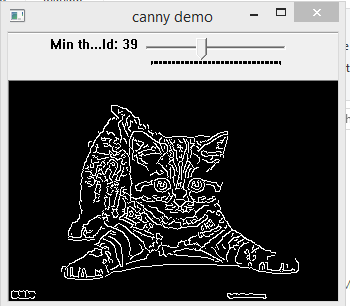
(扩展)动态调整阈值大小程序:
import cv2
import numpy as np
def CannyThreshold(lowThreshold):
detected_edges = cv2.GaussianBlur(gray,(3,3),0)
detected_edges = cv2.Canny(detected_edges,lowThreshold,lowThreshold*ratio,apertureSize = kernel_size)
#dst = cv2.bitwise_and(img,img,mask = detected_edges) # just add some colours to edges from original image.
cv2.imshow('canny demo',detected_edges)
lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3
img = cv2.imread('G:/python project/cat.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.namedWindow('canny demo')
cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold)
CannyThreshold(0) # initialization
if cv2.waitKey(0) == 27:
cv2.destroyAllWindows()
原创自(作者sunny2038):
http://blog.csdn.net/sunny2038/article/details/9170013